Vehicle
Manage two threaded connections between a Qt gRPC™ client and a C++ gRPC server.
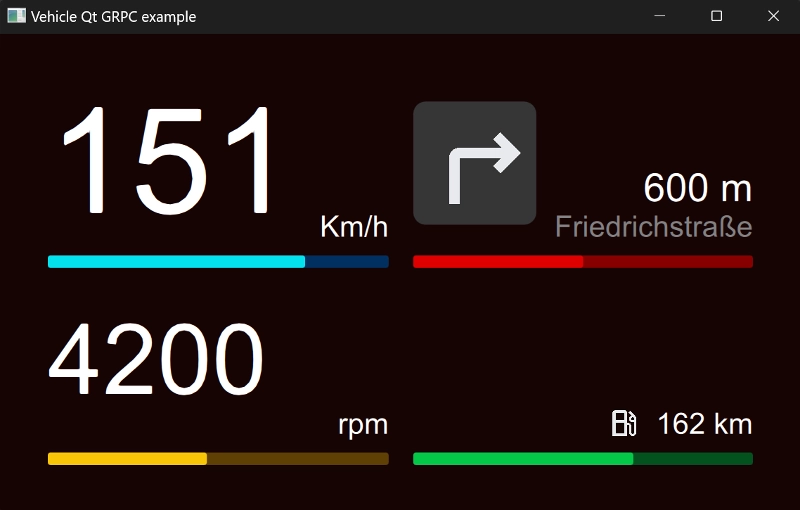
The example simulates a vehicle dashboard that displays data sent by a gRPC server.
The example code has the following components:
vehicle_clientQt gRPC client application that uses the qt_add_protobuf() and qt_add_grpc() CMake functions for message and service Qt code generation.vehicle_serverapplication that calls C++ gRPC plugin for generating server code and implementing simple server logic.
Note: you need the C++ gRPC plugin installed. Find details here: Module prerequisites
Both components use generated messages from the protobuf schemas described in the files vehicleservice.proto and navigationservice.proto.
Vehicle service:
message SpeedMsg {
int32 speed = 1;
}
message RpmMsg {
int32 rpm = 1;
}
message AutonomyMsg {
int32 autonomy = 1;
}
service VehicleService {
rpc getSpeedStream(google.protobuf.Empty) returns (stream SpeedMsg) {}
rpc getRpmStream(google.protobuf.Empty) returns (stream RpmMsg) {}
rpc getAutonomy(google.protobuf.Empty) returns (AutonomyMsg) {}
}Navigation service:
enum DirectionEnum {
RIGHT = 0;
LEFT = 1;
STRAIGHT = 2;
BACKWARD = 3;
}
message NavigationMsg {
int32 totalDistance = 1;
int32 traveledDistance = 2;
DirectionEnum direction = 3;
string street = 4;
}
service NavigationService {
rpc getNavigationStream(google.protobuf.Empty) returns (stream NavigationMsg) {}
}The VehicleManager C++ singleton uses two QThread instances to communicate with the server in parallel. The threads have different gRPC connection types. In this example, there are two types:
- Server streaming RPCs For example, the speed stream of the vehicle thread. It uses two callback functions: QGrpcServerStream::messageReceived and QGrpcOperation::finished
Empty speedRequest; m_streamSpeed = m_client->getSpeedStream(speedRequest); connect(m_streamSpeed.get(), &QGrpcServerStream::messageReceived, this, [this]() { if (const auto speedResponse = m_streamSpeed->read<SpeedMsg>()) { emit speedChanged(speedResponse->speed()); } }); connect( m_streamSpeed.get(), &QGrpcServerStream::finished, this, [this](const QGrpcStatus &status) { if (!status.isOk()) { auto error = QString("Stream error fetching speed %1 (%2)") .arg(status.message()) .arg(QVariant::fromValue(status.code()).toString()); emit connectionError(error); qWarning() << error; return; } }, Qt::SingleShotConnection);
- Unary RPCs The RPC
getAutonomyoperation is a unary RPC. It returns a single response. It is only connected to the QGrpcOperation::finished signal.Empty autonomyRequest; std::unique_ptr<QGrpcCallReply> autonomyReply = m_client->getAutonomy(autonomyRequest); const auto *autonomyReplyPtr = autonomyReply.get(); connect( autonomyReplyPtr, &QGrpcCallReply::finished, this, [this, autonomyReply = std::move(autonomyReply)](const QGrpcStatus &status) { if (!status.isOk()) { auto error = QString("Call error fetching autonomy %1 (%2)") .arg(status.message()) .arg(QVariant::fromValue(status.code()).toString()); emit connectionError(error); qWarning() << error; return; } if (const auto autonomyMsg = autonomyReply->read<AutonomyMsg>()) { emit autonomyChanged(autonomyMsg->autonomy()); } }, Qt::SingleShotConnection);
The client main window interface is defined in the Main.qml file. It uses QML Connections type in order to connect to the signals of the VehicleManager C++ singleton to custom slots:
Connections { target: VehicleManager // This slot will be executed when the VehicleManager::totalDistanceChanged // signal is emitted function onTotalDistanceChanged(distance: int): void { root.totalDistance = distance; } function onSpeedChanged(speed: int): void { root.speed = speed; } function onRpmChanged(rpm: int): void { root.rpm = rpm; } function onTraveledDistanceChanged(distance: int): void { root.traveledDistance = distance; } function onDirectionChanged(direction: int): void { if (direction == VehicleManager.RIGHT) { root.directionImageSource = "qrc:/direction_right.svg"; } else if (direction == VehicleManager.LEFT) { root.directionImageSource = "qrc:/direction_left.svg"; } else if (direction == VehicleManager.STRAIGHT) { root.directionImageSource = "qrc:/direction_straight.svg"; } else { root.directionImageSource = ""; } }
After receiving a response, the client window updates the UI with the received data. This way, messages can be received in different threads and be sent to the client UI in a thread-safe way thanks to the signals.
© 2025 The Qt Company Ltd. Documentation contributions included herein are the copyrights of their respective owners. The documentation provided herein is licensed under the terms of the GNU Free Documentation License version 1.3 as published by the Free Software Foundation. Qt and respective logos are trademarks of The Qt Company Ltd. in Finland and/or other countries worldwide. All other trademarks are property of their respective owners.
