QTransform#
The QTransform class specifies 2D transformations of a coordinate system. More…
Synopsis#
Functions#
def
__reduce__()def
__repr__()def
adjoint()def
determinant()def
dx()def
dy()def
inverted()def
isAffine()def
isIdentity()def
isInvertible()def
isRotating()def
isScaling()def
isTranslating()def
m11()def
m12()def
m13()def
m21()def
m22()def
m23()def
m31()def
m32()def
m33()def
map(x, y)def
map(r)def
map(a)def
map(a)def
map(p)def
map(p)def
map(l)def
map(l)def
map(p)def
mapRect(arg__1)def
mapRect(arg__1)def
mapToPolygon(r)def
__ne__(arg__1)def
__mul__(o)def
__mul__(n)def
__imul__(arg__1)def
__imul__(div)def
__add__(n)def
__iadd__(div)def
__sub__(n)def
__isub__(div)def
__div__(n)def
operator/=(div)def
__eq__(arg__1)def
reset()def
rotate(a[, axis=Qt.ZAxis])def
rotate(a, axis, distanceToPlane)def
rotateRadians(a, axis, distanceToPlane)def
rotateRadians(a[, axis=Qt.ZAxis])def
scale(sx, sy)def
setMatrix(m11, m12, m13, m21, m22, m23, m31, m32, m33)def
shear(sh, sv)def
translate(dx, dy)def
transposed()def
type()
Static functions#
def
fromScale(dx, dy)def
fromTranslate(dx, dy)def
quadToQuad(arg__1, arg__2)def
quadToQuad(one, two, result)def
quadToSquare(arg__1)def
quadToSquare(quad, result)def
squareToQuad(arg__1)def
squareToQuad(square, result)
Note
This documentation may contain snippets that were automatically translated from C++ to Python. We always welcome contributions to the snippet translation. If you see an issue with the translation, you can also let us know by creating a ticket on https:/bugreports.qt.io/projects/PYSIDE
Detailed Description#
Warning
This section contains snippets that were automatically translated from C++ to Python and may contain errors.
A transformation specifies how to translate, scale, shear, rotate or project the coordinate system, and is typically used when rendering graphics.
A QTransform object can be built using the setMatrix() , scale() , rotate() , translate() and shear() functions. Alternatively, it can be built by applying basic matrix operations . The matrix can also be defined when constructed, and it can be reset to the identity matrix (the default) using the reset() function.
The QTransform class supports mapping of graphic primitives: A given point, line, polygon, region, or painter path can be mapped to the coordinate system defined by this matrix using the map() function. In case of a rectangle, its coordinates can be transformed using the mapRect() function. A rectangle can also be transformed into a polygon (mapped to the coordinate system defined by this matrix), using the mapToPolygon() function.
QTransform provides the isIdentity() function which returns true if the matrix is the identity matrix, and the isInvertible() function which returns true if the matrix is non-singular (i.e. AB = BA = I). The inverted() function returns an inverted copy of this matrix if it is invertible (otherwise it returns the identity matrix), and adjoint() returns the matrix’s classical adjoint. In addition, QTransform provides the determinant() function which returns the matrix’s determinant.
Finally, the QTransform class supports matrix multiplication, addition and subtraction, and objects of the class can be streamed as well as compared.
Rendering Graphics#
When rendering graphics, the matrix defines the transformations but the actual transformation is performed by the drawing routines in QPainter .
By default, QPainter operates on the associated device’s own coordinate system. The standard coordinate system of a QPaintDevice has its origin located at the top-left position. The x values increase to the right; y values increase downward. For a complete description, see the coordinate system documentation.
QPainter has functions to translate, scale, shear and rotate the coordinate system without using a QTransform . For example:
Although these functions are very convenient, it can be more efficient to build a QTransform and call setTransform() if you want to perform more than a single transform operation. For example:
Basic Matrix Operations#
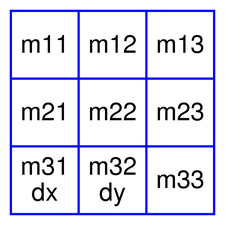
A QTransform object contains a 3 x 3 matrix. The m31 (dx) and m32 (dy) elements specify horizontal and vertical translation. The m11 and m22 elements specify horizontal and vertical scaling. The m21 and m12 elements specify horizontal and vertical shearing. And finally, the m13 and m23 elements specify horizontal and vertical projection, with m33 as an additional projection factor.
QTransform transforms a point in the plane to another point using the following formulas:
x' = m11x + m21y + dx y' = m22y + m12x + dy if not isAffine(): w' = m13x + m23y + m33 x' /= w' y' /= w'
The point (x, y) is the original point, and (x’, y’) is the transformed point. (x’, y’) can be transformed back to (x, y) by performing the same operation on the inverted() matrix.
The various matrix elements can be set when constructing the matrix, or by using the setMatrix() function later on. They can also be manipulated using the translate() , rotate() , scale() and shear() convenience functions. The currently set values can be retrieved using the m11() , m12() , m13() , m21() , m22() , m23() , m31() , m32() , m33() , dx() and dy() functions.
Translation is the simplest transformation. Setting dx and dy will move the coordinate system dx units along the X axis and dy units along the Y axis. Scaling can be done by setting m11 and m22. For example, setting m11 to 2 and m22 to 1.5 will double the height and increase the width by 50%. The identity matrix has m11, m22, and m33 set to 1 (all others are set to 0) mapping a point to itself. Shearing is controlled by m12 and m21. Setting these elements to values different from zero will twist the coordinate system. Rotation is achieved by setting both the shearing factors and the scaling factors. Perspective transformation is achieved by setting both the projection factors and the scaling factors.
Combining Transforms#
Here’s the combined transformations example using basic matrix operations:
The combined transform first scales each operand, then rotates it, and finally translates it, just as in the order in which the product of its factors is written. This means the point to which the transforms are applied is implicitly multiplied on the left with the transform to its right.
Relation to Matrix Notation#
The matrix notation in QTransform is the transpose of a commonly-taught convention which represents transforms and points as matrices and vectors. That convention multiplies its matrix on the left and column vector to the right. In other words, when several transforms are applied to a point, the right-most matrix acts directly on the vector first. Then the next matrix to the left acts on the result of the first operation - and so on. As a result, that convention multiplies the matrices that make up a composite transform in the reverse of the order in QTransform , as you can see in Combining Transforms . Transposing the matrices, and combining them to the right of a row vector that represents the point, lets the matrices of transforms appear, in their product, in the order in which we think of the transforms being applied to the point.
- class PySide6.QtGui.QTransform#
PySide6.QtGui.QTransform(other)
PySide6.QtGui.QTransform(h11, h12, h13, h21, h22, h23, h31, h32, h33)
PySide6.QtGui.QTransform(h11, h12, h21, h22, dx, dy)
- Parameters:
dy – float
h13 – float
h31 – float
dx – float
h33 – float
h23 – float
h21 – float
h11 – float
other –
PySide6.QtGui.QTransformh22 – float
h32 – float
h12 – float
Constructs an identity matrix.
All elements are set to zero except m11 and m22 (specifying the scale) and m33 which are set to 1.
See also
Constructs a matrix with the elements, m11, m12, m13, m21, m22, m23, m31, m32, m33.
See also
Constructs a matrix with the elements, m11, m12, m21, m22, dx and dy.
See also
- PySide6.QtGui.QTransform.TransformationType#
Constant
Description
QTransform.TxNone
QTransform.TxTranslate
QTransform.TxScale
QTransform.TxRotate
QTransform.TxShear
QTransform.TxProject
- PySide6.QtGui.QTransform.__reduce__()#
- Return type:
object
- PySide6.QtGui.QTransform.__repr__()#
- Return type:
object
- PySide6.QtGui.QTransform.adjoint()#
- Return type:
Returns the adjoint of this matrix.
- PySide6.QtGui.QTransform.determinant()#
- Return type:
float
Returns the matrix’s determinant.
- PySide6.QtGui.QTransform.dx()#
- Return type:
float
Returns the horizontal translation factor.
See also
m31()translate()Basic Matrix Operations
- PySide6.QtGui.QTransform.dy()#
- Return type:
float
Returns the vertical translation factor.
See also
translate()Basic Matrix Operations
- static PySide6.QtGui.QTransform.fromScale(dx, dy)#
- Parameters:
dx – float
dy – float
- Return type:
Creates a matrix which corresponds to a scaling of sx horizontally and sy vertically. This is the same as QTransform() .scale(sx, sy) but slightly faster.
- static PySide6.QtGui.QTransform.fromTranslate(dx, dy)#
- Parameters:
dx – float
dy – float
- Return type:
Creates a matrix which corresponds to a translation of dx along the x axis and dy along the y axis. This is the same as QTransform() .translate(dx, dy) but slightly faster.
- PySide6.QtGui.QTransform.inverted()#
- Return type:
PyTuple
Returns an inverted copy of this matrix.
If the matrix is singular (not invertible), the returned matrix is the identity matrix. If invertible is valid (i.e. not 0), its value is set to true if the matrix is invertible, otherwise it is set to false.
See also
- PySide6.QtGui.QTransform.isAffine()#
- Return type:
bool
Returns true if the matrix represent an affine transformation, otherwise returns false.
- PySide6.QtGui.QTransform.isIdentity()#
- Return type:
bool
Returns true if the matrix is the identity matrix, otherwise returns false.
See also
- PySide6.QtGui.QTransform.isInvertible()#
- Return type:
bool
Returns true if the matrix is invertible, otherwise returns false.
See also
- PySide6.QtGui.QTransform.isRotating()#
- Return type:
bool
Returns true if the matrix represents some kind of a rotating transformation, otherwise returns false.
Note
A rotation transformation of 180 degrees and/or 360 degrees is treated as a scaling transformation.
See also
- PySide6.QtGui.QTransform.isScaling()#
- Return type:
bool
Returns true if the matrix represents a scaling transformation, otherwise returns false.
See also
- PySide6.QtGui.QTransform.isTranslating()#
- Return type:
bool
Returns true if the matrix represents a translating transformation, otherwise returns false.
See also
- PySide6.QtGui.QTransform.m11()#
- Return type:
float
Returns the horizontal scaling factor.
See also
scale()Basic Matrix Operations
- PySide6.QtGui.QTransform.m12()#
- Return type:
float
Returns the vertical shearing factor.
See also
shear()Basic Matrix Operations
- PySide6.QtGui.QTransform.m13()#
- Return type:
float
Returns the horizontal projection factor.
See also
translate()Basic Matrix Operations
- PySide6.QtGui.QTransform.m21()#
- Return type:
float
Returns the horizontal shearing factor.
See also
shear()Basic Matrix Operations
- PySide6.QtGui.QTransform.m22()#
- Return type:
float
Returns the vertical scaling factor.
See also
scale()Basic Matrix Operations
- PySide6.QtGui.QTransform.m23()#
- Return type:
float
Returns the vertical projection factor.
See also
translate()Basic Matrix Operations
- PySide6.QtGui.QTransform.m31()#
- Return type:
float
Returns the horizontal translation factor.
See also
dx()translate()Basic Matrix Operations
- PySide6.QtGui.QTransform.m32()#
- Return type:
float
Returns the vertical translation factor.
See also
dy()translate()Basic Matrix Operations
- PySide6.QtGui.QTransform.m33()#
- Return type:
float
Returns the division factor.
See also
translate()Basic Matrix Operations
- PySide6.QtGui.QTransform.map(x, y)#
- Parameters:
x – float
y – float
- Return type:
PyObject
Warning
This section contains snippets that were automatically translated from C++ to Python and may contain errors.
Maps the given coordinates x and y into the coordinate system defined by this matrix. The resulting values are put in *``tx`` and *``ty``, respectively.
The coordinates are transformed using the following formulas:
x' = m11x + m21y + dx y' = m22y + m12x + dy if not isAffine(): w' = m13x + m23y + m33 x' /= w' y' /= w'
The point (x, y) is the original point, and (x’, y’) is the transformed point.
See also
Basic Matrix Operations
- PySide6.QtGui.QTransform.map(r)
- Parameters:
- Return type:
This is an overloaded function.
Creates and returns a QRegion object that is a copy of the given region, mapped into the coordinate system defined by this matrix.
Calling this method can be rather expensive if rotations or shearing are used.
- PySide6.QtGui.QTransform.map(a)
- Parameters:
- Return type:
This is an overloaded function.
Creates and returns a QPolygonF object that is a copy of the given polygon, mapped into the coordinate system defined by this matrix.
- PySide6.QtGui.QTransform.map(a)
- Parameters:
- Return type:
This is an overloaded function.
Creates and returns a QPolygon object that is a copy of the given polygon, mapped into the coordinate system defined by this matrix. Note that the transformed coordinates are rounded to the nearest integer.
- PySide6.QtGui.QTransform.map(p)
- Parameters:
- Return type:
This is an overloaded function.
Creates and returns a QPoint object that is a copy of the given point, mapped into the coordinate system defined by this matrix. Note that the transformed coordinates are rounded to the nearest integer.
- PySide6.QtGui.QTransform.map(p)
- Parameters:
- Return type:
This is an overloaded function.
Creates and returns a QPointF object that is a copy of the given point, p, mapped into the coordinate system defined by this matrix.
- PySide6.QtGui.QTransform.map(l)
- Parameters:
- Return type:
This is an overloaded function.
Creates and returns a QLineF object that is a copy of the given line, l, mapped into the coordinate system defined by this matrix.
- PySide6.QtGui.QTransform.map(l)
- Parameters:
- Return type:
This is an overloaded function.
Creates and returns a QLine object that is a copy of the given line, mapped into the coordinate system defined by this matrix. Note that the transformed coordinates are rounded to the nearest integer.
- PySide6.QtGui.QTransform.map(p)
- Parameters:
- Return type:
This is an overloaded function.
Creates and returns a QPainterPath object that is a copy of the given path, mapped into the coordinate system defined by this matrix.
- PySide6.QtGui.QTransform.mapRect(arg__1)#
- Parameters:
arg__1 –
PySide6.QtCore.QRect- Return type:
This is an overloaded function.
Creates and returns a QRect object that is a copy of the given rectangle, mapped into the coordinate system defined by this matrix. Note that the transformed coordinates are rounded to the nearest integer.
- PySide6.QtGui.QTransform.mapRect(arg__1)
- Parameters:
arg__1 –
PySide6.QtCore.QRectF- Return type:
Warning
This section contains snippets that were automatically translated from C++ to Python and may contain errors.
Creates and returns a QRectF object that is a copy of the given rectangle, mapped into the coordinate system defined by this matrix.
The rectangle’s coordinates are transformed using the following formulas:
x' = m11x + m21y + dx y' = m22y + m12x + dy if not isAffine(): w' = m13x + m23y + m33 x' /= w' y' /= w'
If rotation or shearing has been specified, this function returns the bounding rectangle. To retrieve the exact region the given rectangle maps to, use the mapToPolygon() function instead.
See also
mapToPolygon()Basic Matrix Operations
- PySide6.QtGui.QTransform.mapToPolygon(r)#
- Parameters:
- Return type:
Warning
This section contains snippets that were automatically translated from C++ to Python and may contain errors.
Creates and returns a QPolygon representation of the given rectangle, mapped into the coordinate system defined by this matrix.
The rectangle’s coordinates are transformed using the following formulas:
x' = m11x + m21y + dx y' = m22y + m12x + dy if not isAffine(): w' = m13x + m23y + m33 x' /= w' y' /= w'
Polygons and rectangles behave slightly differently when transformed (due to integer rounding), so matrix.map(QPolygon(rectangle)) is not always the same as matrix.mapToPolygon(rectangle).
See also
mapRect()Basic Matrix Operations
- PySide6.QtGui.QTransform.__ne__(arg__1)#
- Parameters:
arg__1 –
PySide6.QtGui.QTransform- Return type:
bool
Returns true if this matrix is not equal to the given matrix, otherwise returns false.
- PySide6.QtGui.QTransform.__mul__(o)#
- Parameters:
- Return type:
Returns the result of multiplying this matrix by the given matrix.
Note that matrix multiplication is not commutative, i.e. a*b != b*a.
- PySide6.QtGui.QTransform.__mul__(n)
- Parameters:
n – float
- Return type:
- PySide6.QtGui.QTransform.__imul__(arg__1)#
- Parameters:
arg__1 –
PySide6.QtGui.QTransform- Return type:
This is an overloaded function.
Returns the result of multiplying this matrix by the given matrix.
- PySide6.QtGui.QTransform.__imul__(div)
- Parameters:
div – float
- Return type:
This is an overloaded function.
Returns the result of performing an element-wise multiplication of this matrix with the given scalar.
- PySide6.QtGui.QTransform.__add__(n)#
- Parameters:
n – float
- Return type:
- PySide6.QtGui.QTransform.__iadd__(div)#
- Parameters:
div – float
- Return type:
This is an overloaded function.
Returns the matrix obtained by adding the given scalar to each element of this matrix.
- PySide6.QtGui.QTransform.__sub__(n)#
- Parameters:
n – float
- Return type:
- PySide6.QtGui.QTransform.__isub__(div)#
- Parameters:
div – float
- Return type:
This is an overloaded function.
Returns the matrix obtained by subtracting the given scalar from each element of this matrix.
- PySide6.QtGui.QTransform.__div__(n)#
- Parameters:
n – float
- Return type:
- PySide6.QtGui.QTransform.operator/=(div)
- Parameters:
div – float
- Return type:
This is an overloaded function.
Returns the result of performing an element-wise division of this matrix by the given scalar.
- PySide6.QtGui.QTransform.__eq__(arg__1)#
- Parameters:
arg__1 –
PySide6.QtGui.QTransform- Return type:
bool
Returns true if this matrix is equal to the given matrix, otherwise returns false.
- static PySide6.QtGui.QTransform.quadToQuad(arg__1, arg__2)#
- Parameters:
arg__1 –
PySide6.QtGui.QPolygonFarg__2 –
PySide6.QtGui.QPolygonF
- Return type:
object
- static PySide6.QtGui.QTransform.quadToQuad(one, two, result)
- Parameters:
one –
PySide6.QtGui.QPolygonFtwo –
PySide6.QtGui.QPolygonFresult –
PySide6.QtGui.QTransform
- Return type:
bool
Creates a transformation matrix, trans, that maps a four-sided polygon, one, to another four-sided polygon, two. Returns true if the transformation is possible; otherwise returns false.
This is a convenience method combining quadToSquare() and squareToQuad() methods. It allows the input quad to be transformed into any other quad.
See also
- static PySide6.QtGui.QTransform.quadToSquare(arg__1)#
- Parameters:
arg__1 –
PySide6.QtGui.QPolygonF- Return type:
object
- static PySide6.QtGui.QTransform.quadToSquare(quad, result)
- Parameters:
quad –
PySide6.QtGui.QPolygonFresult –
PySide6.QtGui.QTransform
- Return type:
bool
Creates a transformation matrix, trans, that maps a four-sided polygon, quad, to a unit square. Returns true if the transformation is constructed or false if such a transformation does not exist.
See also
- PySide6.QtGui.QTransform.reset()#
Resets the matrix to an identity matrix, i.e. all elements are set to zero, except m11 and m22 (specifying the scale) and m33 which are set to 1.
See also
QTransform()isIdentity()Basic Matrix Operations
This is an overloaded function.
Rotates the coordinate system counterclockwise by the given angle a about the specified axis at distance 1024.0 from the screen and returns a reference to the matrix.
Note that if you apply a QTransform to a point defined in widget coordinates, the direction of the rotation will be clockwise because the y-axis points downwards.
The angle is specified in degrees.
See also
- PySide6.QtGui.QTransform.rotate(a, axis, distanceToPlane)
- Parameters:
a – float
axis –
AxisdistanceToPlane – float
- Return type:
Rotates the coordinate system counterclockwise by the given angle a about the specified axis at distance distanceToPlane from the screen and returns a reference to the matrix.
Note that if you apply a QTransform to a point defined in widget coordinates, the direction of the rotation will be clockwise because the y-axis points downwards.
The angle is specified in degrees. If distanceToPlane is zero, it will be ignored. This is suitable for implementing orthographic projections where the z coordinate should be dropped rather than projected.
See also
- PySide6.QtGui.QTransform.rotateRadians(a, axis, distanceToPlane)#
- Parameters:
a – float
axis –
AxisdistanceToPlane – float
- Return type:
Rotates the coordinate system counterclockwise by the given angle a about the specified axis at distance distanceToPlane from the screen and returns a reference to the matrix.
Note that if you apply a QTransform to a point defined in widget coordinates, the direction of the rotation will be clockwise because the y-axis points downwards.
The angle is specified in radians. If distanceToPlane is zero, it will be ignored. This is suitable for implementing orthographic projections where the z coordinate should be dropped rather than projected.
See also
- PySide6.QtGui.QTransform.rotateRadians(a[, axis=Qt.ZAxis])
- Parameters:
a – float
axis –
Axis
- Return type:
This is an overloaded function.
Rotates the coordinate system counterclockwise by the given angle a about the specified axis at distance 1024.0 from the screen and returns a reference to the matrix.
Note that if you apply a QTransform to a point defined in widget coordinates, the direction of the rotation will be clockwise because the y-axis points downwards.
The angle is specified in radians.
See also
- PySide6.QtGui.QTransform.scale(sx, sy)#
- Parameters:
sx – float
sy – float
- Return type:
Scales the coordinate system by sx horizontally and sy vertically, and returns a reference to the matrix.
See also
- PySide6.QtGui.QTransform.setMatrix(m11, m12, m13, m21, m22, m23, m31, m32, m33)#
- Parameters:
m11 – float
m12 – float
m13 – float
m21 – float
m22 – float
m23 – float
m31 – float
m32 – float
m33 – float
Sets the matrix elements to the specified values, m11, m12, m13 m21, m22, m23 m31, m32 and m33. Note that this function replaces the previous values. QTransform provides the translate() , rotate() , scale() and shear() convenience functions to manipulate the various matrix elements based on the currently defined coordinate system.
See also
QTransform()
- PySide6.QtGui.QTransform.shear(sh, sv)#
- Parameters:
sh – float
sv – float
- Return type:
Shears the coordinate system by sh horizontally and sv vertically, and returns a reference to the matrix.
See also
- static PySide6.QtGui.QTransform.squareToQuad(arg__1)#
- Parameters:
arg__1 –
PySide6.QtGui.QPolygonF- Return type:
object
- static PySide6.QtGui.QTransform.squareToQuad(square, result)
- Parameters:
square –
PySide6.QtGui.QPolygonFresult –
PySide6.QtGui.QTransform
- Return type:
bool
Creates a transformation matrix, trans, that maps a unit square to a four-sided polygon, quad. Returns true if the transformation is constructed or false if such a transformation does not exist.
See also
- PySide6.QtGui.QTransform.translate(dx, dy)#
- Parameters:
dx – float
dy – float
- Return type:
Moves the coordinate system dx along the x axis and dy along the y axis, and returns a reference to the matrix.
See also
- PySide6.QtGui.QTransform.transposed()#
- Return type:
Returns the transpose of this matrix.
- PySide6.QtGui.QTransform.type()#
- Return type:
Returns the transformation type of this matrix.
The transformation type is the highest enumeration value capturing all of the matrix’s transformations. For example, if the matrix both scales and shears, the type would be TxShear, because TxShear has a higher enumeration value than TxScale.
Knowing the transformation type of a matrix is useful for optimization: you can often handle specific types more optimally than handling the generic case.